阿联酋科学家研发柔性传感器,让医生在微创手术中“重获触觉”!随着越来越多手术采用微创或“钥匙孔”方式,这项技术可能会变得极其重要。它还能应用于远程手术,让医生跨越半个地球为患者动刀。纽约大学阿布扎比分校的研究人员已经申请了专利,并希望成立一家衍生公司,将这项技术商业化。通常,在微创手术中,医生会切一个小口,然后用一根细长的管子(腹腔镜)进行操作。在其他手术中,医生会用带摄像头的内窥镜探查体内并治疗疾病。相比传统开刀手术,微创手术恢复更快、疤痕更少,在疝气手术、胆囊或阑尾切除中已经非常流行。
这项创新为什么重要?
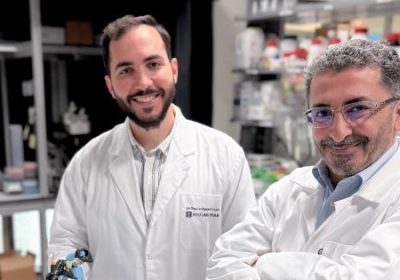
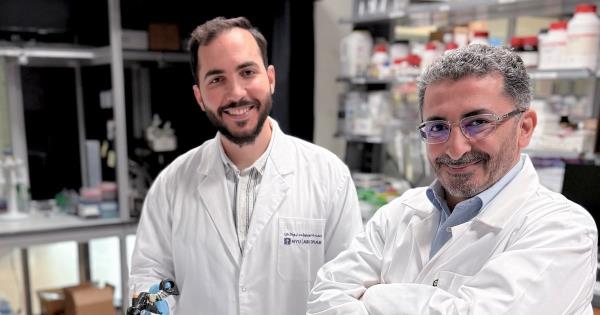
然而,纽约大学阿布扎比分校机械工程与生物工程副教授穆罕默德·卡萨梅赫博士表示,微创手术给医生的触觉反馈很少,很难判断用了多大力度。“有经验的医生能凭经验感知,但问题是新手或培训中的外科医生,”他告诉《国家报》,“我们能不能开发一种设备——腹腔镜工具、内窥镜工具,以及所有用于微创手术和机器人手术的工具——让它具备力量感应,知道我们抓了多大力?”“我们会不会伤害病人体内被夹住的组织?能不能判断组织的硬度?它是很软还是很硬?”卡萨梅赫博士和同事开发的柔性硅胶传感器,正是为了帮医生回答这些问题。传感器内部有多个充满液态金属的通道。当压力施加时,金属流动导致通道变形,从而产生触感。研究人员将传感器装在腹腔镜抓钳上:一个放在手柄上,测量医生施加的力;另一个放在钳口,测量与组织的交互。这项技术的详细内容已发表在《微系统与纳米工程》期刊上。研究第一作者、卡萨梅赫博士实验室前博士后研究员、今年1月起担任阿布扎比哈利法大学助理教授的维勒·奥斯曼博士在一份声明中说,目标是“制造既灵敏又适用于真实手术环境的传感器”。
“这种设计让我们能在同一个微小设备里测量轻柔到强大的力量,还能把传感器放在手术工具上最需要的地方,”他说。在之前的一项研究中,卡萨梅赫博士和同事买过市售传感器,但发现“不够好”。
他说,要么不够灵活(太硬),要么难以集成、不可靠,每次还得重新校准。在早期工作中,研究人员邀请外科医生用手术工具夹生肉或熟肉,让他们判断哪块软、哪块硬。结果发现,有了基本的触觉反馈,医生能更准确地判断样本的硬度——这凸显了触觉的重要性。
下一步是什么?
这项技术可以用于现有的腹腔镜工具、研究人员开发的新工具,甚至能用在高科技手术机器人上。“这些手术机器人很厉害。你可以在大脑、眼科等显微镜手术中做到超高精度。但你可能想不到,那些价值超过100万美元的手术机器人,居然没有主动反馈传感器,”卡萨梅赫博士说。“如果我们能和这些机器人公司合作,把这种集成感知能力加到他们的机器人里,那会很简单。”卡萨梅赫博士说,这项技术还能用于远程手术。这种由互联网支持的技术,能用遥控器给几千公里外的患者做手术。“在这种场景下,医生当然需要一些触感,”他说,“除了摄像头,医生还需要某种反馈。”要实现这项技术的商业化,必须提高传感器的生产速度。“我们需要大规模生产,比如每天能造出100个传感器,”卡萨梅赫博士说,“目前每个传感器要花一天时间,因为我们是纯手工制作,不是自动化或半自动化的。要进入市场,就得考虑规模化。”